
论著|机器人辅助与DSA引导经皮穿刺三叉神经球囊压迫术临床对比分析
2024-12-06 中国神经精神疾病杂志 中国神经精神疾病杂志 发表于陕西省

本研究聚焦机器人辅助和DSA引导两种手术方式,比较两种术式的优缺点,现报告如下。
摘 要
目的 比较机器人辅助和数字减影血管造影(digital subtraction angiography,DSA)引导经皮穿刺三叉神经球囊压迫(percutaneous balloon compression,PBC)术两种术式的优缺点。
方法 回顾性分析2021年9月至2024年2月在一个中心连续开展的所有机器人辅助和DSA引导PBC术患者的临床资料85例(机器人组28例,DSA组57 例),对比两组患者的一次穿刺成功率、视觉模拟评分 (visual analogue scale,VAS)改善率、临床有效率、并发症率、手术时间及透视时间。
结果 两组在一次性穿刺成功率(96.43% vs. 84.21%)、VAS评分改善率[88.89%(77.78%,100.00%) vs. 88.89%(55.56%,100.00%)]、临床有效率(92.86% vs. 94.74%)及并发症总发生率(35.71% vs. 42.11%)上的差异无统计学意义(P>0.05)。机器人组手术时间[38.50(35.00,48.00)min]显著高于DSA组[19.00(15.00,25.50)min],机器人组透视时间[13.00(12.00,15.75)s]显著低于DSA组[194.00(152.50,259.50)s], 两组平均手术及透视时间差异有统计学意义(P<0.05)。
结论 DSA引导手术在患者量大,追求效率的中心更有优势;而机器人辅助手术穿刺过程安全可控,患者射线暴露时间短,具有较高的临床应用和推广价值。
关键词
机器人;数字减影血管造影;经皮穿刺球囊压迫术;三叉神经痛;对比分析
三叉神经痛(trigeminal neuralgia,TN)的外科治疗经过多年的发展,形成了显微血管减压术(microvascular decompression, MVD)、经皮射频热凝术(percutaneous radiofrequency rhizotomy,PRR)、经皮甘油损毁术(percutaneous glycerol rhizotomy,PGR)和经皮穿刺球囊压迫术(percutaneous balloon compression,PBC)等多种手术方式[1-3]。PBC是经皮肤穿刺将球囊通过卵圆孔送入Meckel囊内,然后在球囊内注入造影剂对三叉神经半月神经节进行临时压迫,损伤三叉神经根传导疼痛的粗大有髓神经纤维,而细小无髓神经纤维不受损害,使疼痛得到缓解而不影响运动功能[4]。影像学和立体定向技术的发展促进了PBC手术技术的成熟,但术中依然存在穿刺方向不当、球囊深度偏差等情况,损伤卵圆孔周围重要结构,导致严重的并发症[5-7]。球囊的精确穿刺及置位成为手术成功的关键,相关手术技术经历了X光透视、CT引导、DSA引导、神经导航辅助、机器人辅助等迭代更新[8-10]。本研究聚焦机器人辅助和DSA引导两种手术方式,比较两种术式的优缺点,现报告如下。
1 对象与方法
1.1 研究对象 回顾分析广西壮族自治区人民医院神经外科2021 年 9月至 2024 年2月间收治的TN病例。纳入标准:①临床诊断为TN;②术前行头颅CT检查,排除继发性TN;③经过药物正规治疗,效果欠佳或不能耐受药物不良反应;④存在 MVD禁忌证或拒绝开颅手术;⑤采用机器人辅助或DSA引导PBC术治疗。排除标准:①患者存在穿刺部位皮肤感染或缺损;②患者存在严重合并症,无法耐受PBC手术;③患者存在口腔疾病无法张口或口腔严重感染。
1.2 资料收集 收集患者的临床资料,包括性别、年龄、侧别,一次性穿刺成功率、手术前后疼痛程度、手术并发症率,手术时间及透视时间。手术前、后采用视觉模拟评分法(visual analogue scale,VAS)评估患者的疼痛程度。VAS评分改善率=(术前VAS评分-术后VAS评分)/术前VAS评分×100%。术后VAS 0分,无疼痛不需要服药为治愈;术后VAS评分较术前下降,仍需服药但药量减少为部分有效;术后VAS评分同术前,症状无改善为无效。治愈、部分有效都表示临床有效,临床有效率=临床有效/总治疗例数×100%。
1.3 方法 机器人组术前标记患者前额靠近发际线4个定位点,皮肤消毒,2%利多卡因注射液局部浸润麻醉,用手持电钻将4颗导航骨钉钉入患者颅骨板,行头颅CT检查(层厚1 mm,自下颌到颅顶平行听-眦线连续扫描),将CT扫描数据传输到机器人工作站(Sino Plan-V3.0.1.4)中,设计穿刺路径及验证路径(图 1)。全身麻醉后患者取仰卧位,Mayfield三钉头架固定头部, C型臂X光机置对侧位,神经外科手术机器人[华科精准(北京)医疗科技有限公司,SR1-3D]载入手术计划,调整床位高度使穿刺入点距地面100~110 cm,机器人机械臂基底部距穿刺入点45~50 cm,机器人升起固定后连接三钉头架,骨钉注册法进行机械臂注册(注册误差0.19~0.37 mm)。头面部常规消毒铺巾,机械臂套无菌保护套并安装器械适配器,准备脑科一次性球囊导管套件(深圳擎源医疗器械有限公司,QKS-0050004 )接三通,造影剂(碘佛醇50 mL与生理盐水2∶1稀释)注入排出空气,确认球囊完整无破损。机械臂根据手术计划自动定位导航,尖刀刺破皮肤,将穿刺针沿器械适配器的针道缓慢送入,直至穿刺针尾紧贴适配器,手推机械臂到达计划深度。C型臂X光机行侧位透视,确认穿刺针头端置入卵圆孔后拔出针芯置入球囊,X光透视球囊头端Marker超出穿刺针套管约15 mm,微微下垂形如“鱼竿”状。球囊内注射对比剂0.4~0.8 mL,理想状态下X光透视显示球囊呈“梨形”(图 2 A,B ),监护仪可见一过性血压升高。球囊压迫 2~3 min后再次X 光透视确认球囊无破损,回抽造影剂,撤出套管和球囊,卸下头钉,贴无菌敷贴。
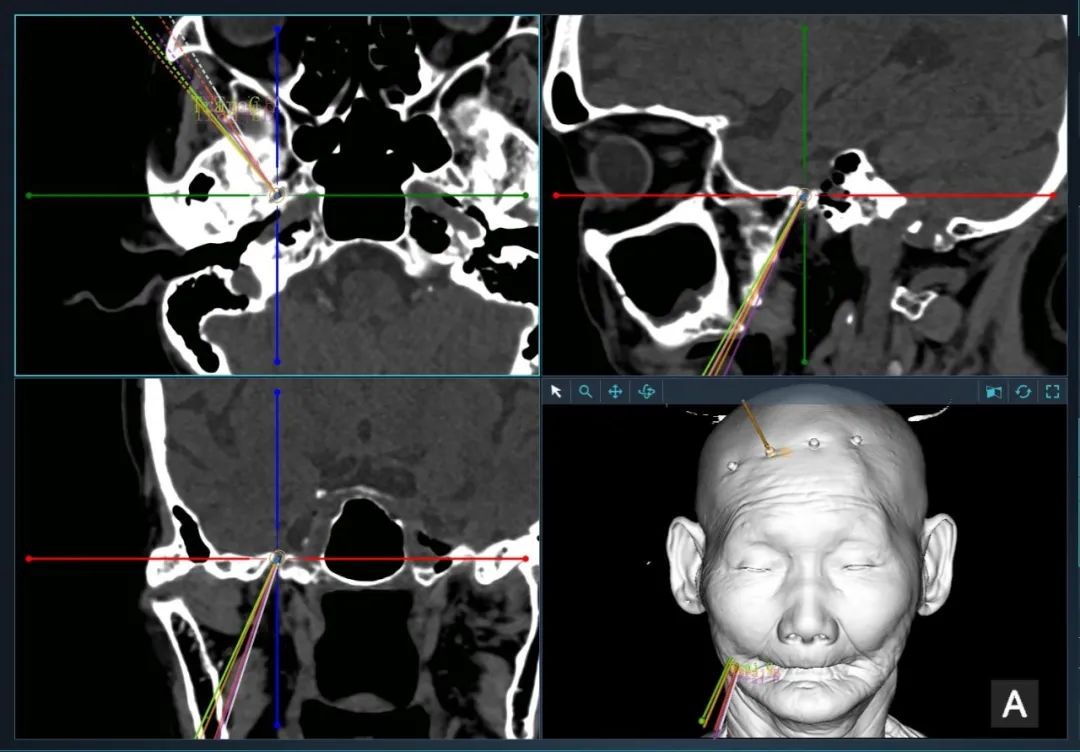
图1 手术路径设计 在患者薄层CT轴、冠、矢状位上寻找患侧卵圆孔,以卵圆孔三维中心为靶点,表面重建后以患侧口角旁开约2.5 cm为入点,设计数条穿刺路径,以便一条路径穿刺失败后可换用其他路径;以导航头钉为靶点,设计一条打靶路径,在术中验证穿刺精准度。Fig1 Surgical plan design
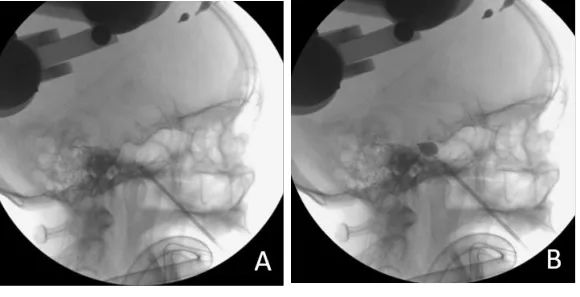
图2 机器人辅助球囊穿刺透视 A.穿刺针到达卵圆孔后置入球囊导管,头端微微下垂形如“鱼竿”状;B.球囊内注射对比剂, X光透视显示球囊呈典型“梨形”。Fig.2 Robot assisted PBC fluoroscopy
DSA组患者全身麻醉后仰卧于工作床,下颌稍上抬,常规消毒铺巾,准备球囊导管套件及造影剂。选择 Hartel前入路[11],穿刺点在患侧口角旁开2.5 cm处,调节DSA( SIEMENS ARTIS pheno 血管造影机)球管使双侧外耳道重叠并能清楚看到卵圆孔图像,采用同轴技术,在动态引导下调整穿刺针穿刺方向,直至穿刺进卵圆孔内。穿刺针抵达卵圆孔后拔出针芯,置入脑科一次性球囊,以相同的策略行球囊压迫。
1.4 统计学方法 应用SPSS 26.0进行统计分析,正态分布计量资料以x±s表示,组间比较行t检验;非正态分布计量资料采用 M(QL,QU)表示,组间比较行Mann-Whitney U检验;计数资料比较行χ2检验。检验水准α=0.05。
2 结果
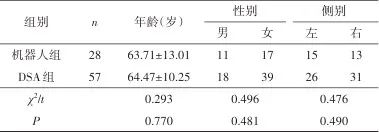
2.1 临床资料 收集病例共85例,其中采用机器人辅助手术28例,DSA引导手术57 例。机器人组:男11例,女17例;左侧发病15例,右侧发病13例。DSA组:男18例,女39例;左侧发病26 例,右侧发病31例。在性别、年龄、侧别上两组差异无统计学意义(P>0.05,表 1 )。
表1 患者资料对比Tab.1 Comparison of patient data
2.2 手术效果及比较 机器人组一次性穿刺成功率 96.43%(27例),DSA组84.21%(48例),机器人组唯一1例穿刺失败是由于患者卵圆孔狭小、周围骨质增生,使得穿刺角度极其刁钻,机械臂路径无法到达而失败。机器人组术前VAS 9.00(9.00,9.75)分,术后VAS 1.00(0.00,2.00)分,改善率为88.89%(77.78%,100.00%);DSA组术前VAS 9.00(9.00,10.00)分,术后VAS 1.00(0.00,3.50)分,改善率为88.89%(55.56%,100.00%);机器人组临床有效率 92.86%(26例),其中治愈22例,部分有效4例;DSA组为 94.74%(54例),其中治愈43例,部分有效11例;两组一次性穿刺成功率、VAS评分改善率、临床有效率之间的差异无统计学差异(P>0.05,表2)。
表2 手术效果及并发症率对比Tab.2 Comparison of surgical results and complication rates
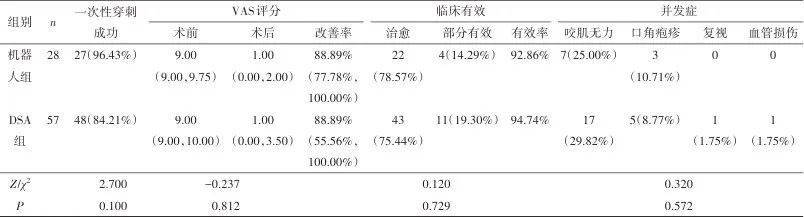
2.3 手术并发症率比较 机器人组并发症总发生率为 35.71%(10例),共出现咬肌无力7例(25.00%)、口角疱疹3例(10.71%);DSA组并发症总发生率为 42.11%(24例),共出现咬肌无力17例(29.82%)、口角疱疹 5例(8.77%)、复视 1例(1.75%)、血管损伤1例(1.75%),两组并发症总发生率的差异无统计学意义(P>0.05,表2)。机器人组未出现穿刺相关并发症,DSA组由于进针方向错误、穿刺过深造成复视、血管损伤等穿刺相关并发症2例(3.51%)。
2.4 手术及透视时间比较 机器人组手术时间[38.50(35.00,48.00) min]显著高于DSA组[19.00(15.00,25.50) min],机器人组透视时间[13.00(12.00,15.75)s]显著低于DSA组[194.00(152.50,259.50) s],手术时间与透视时间的差异有统计学意义(P<0.01),见表3。
表3 平均手术及透视时间比较Tab.3 Comparison of average operation and fluoroscopy time
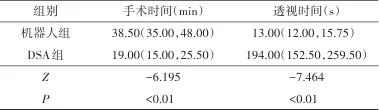
注:手术时间指全麻成功后患者交给手术医生操作到手术医生完成所有操作所需的时间。
3 讨论
MVD被认为是外科治疗TN的金标准[12],与传统的MVD手术相比,PBC手术具有麻醉时间短、手术创伤小、治疗费用低等优势,成为越来越多TN患者的选择,尤其是老年患者[13-14]。卵圆孔的精准穿刺是PBC手术成功关键,手术过程中可能出现的并发症包括:脑组织损伤出血、血管损伤出血、脑脊液漏、视力障碍、上睑下垂、眼球运动障碍等 [15-17] 。DSA可实时动态引导穿刺,及时调整穿刺方向,术中穿刺可视化能减少并发症发生率,是目前主流的一种手术方式[18]。随着神经外科手术机器人的逐步应用,机器人辅助PBC术在国内外均已见报道[19-24]。依托机械臂引导,术者可以精准穿刺卵圆孔,准确置入球囊,是治疗TN安全有效的新型手术方法[19]。
本研究中两种手术方式在一次性穿刺成功率、VAS评分改善率、临床有效率、总体并发症率上均无统计学差异,机器人组手术时间明显高于DSA组,机器人辅助手术似乎没有任何优势。从个例分析来看,DSA组出现复视、血管损伤等2例严重并发症,均是由于进针方向错误、穿刺过深造成,而机器人辅助手术组并未发生穿刺相关并发症,在安全性上显得更为可控。相较DSA引导手术,机器人辅助手术有以下特点[20-21]:①穿刺过程完全按照手术计划的轨迹运行,与以往徒手穿刺依赖术者经验不同,术者无需考虑穿刺角度、深度、力度等,只需按部就班的将穿刺针沿适配器穿刺到位即可,程式化的操作对术者经验的积累有很大的帮助,尤其在PBC学习曲线的初期;② 机械臂适配器限制了穿刺针的进针深度和方向,避免了以往徒手穿刺过深、方向错误损伤颅内结构及周围重要血管的情况;③机器人辅助手术射线透视时间对比DSA引导手术明显减少,仅需在机器摆位、确认穿刺针位置及判断球囊形状时透视数次,透视时术者均在铅墙后操作,几乎接受不到辐射,患者射线暴露时间大幅降低。
在机器人辅助PBC手术过程中,我们也发现了一些问题需要探讨和解决 [20,22]:①机器人辅助手术准备工作烦琐,手术计划、机械臂注册,以及C型臂X光机、麻醉监护仪、铅墙摆位等过程会增加手术时间,虽然熟练操作后手术整体时间可控制在40 min以内,仍明显长于DSA引导手术时间;②机器人辅助手术需要固定头位以确保机器人注册准确,本研究均采用骨钉注册及三钉头架固定方式手术,额外的皮肤损伤降低患者了术后的舒适度;③不同患者颅底解剖差异性很大,并非所有患者适合机器人辅助手术,本研究中机器人组有1例穿刺失败就是由于患者卵圆孔狭小、周围骨质增生,使得穿刺角度极度刁钻,机械臂路径无法到达而失败。未来随着技术的进步,无创注册方式(如皮肤贴标记、3D结构光、激光面配准等)精度不断提高,无创头部固定方案(3D塑性枕等)不断涌现以及机器人机械臂活动范围、运动速度不断提高,上述问题也将会逐步解决[23-24]。
本研究分析了不同穿刺方法行PBC术的临床结果,为手术方案的选择提供了理论依据,但也存在一些局限性:并非所有手术都由同一位神经外科医生进行,医生根据患者情况及自己熟悉的手术方式选择治疗方法;由于机器人辅助手术起步较晚,病例相对较少,这导致临床结果在某种程度上未达到统计学意义;本研究的临床效果及并发症判定均在患者住院期间,远期效果有待更长时间随访评估。
综上所述,机器人辅助和DSA引导两种手术方式都有显著的临床疗效和相似的并发症率。DSA 组平均手术时间要短于机器人组,DSA引导手术在患者量大,追求效率的中心更有优势。机器人辅助手术一次性穿刺成功率更高,未发生复视、血管损伤等穿刺相关并发症,穿刺过程安全可控;手术透视时术者几乎接受不到辐射,患者射线暴露时间大幅缩短,具有较高的临床应用和推广价值。
参考文献:
1. NASCIMENTO R F V, PIPEK L Z, DE AGUIAR P H P. Is percutaneous balloon compression better than microvascular decompression to treat trigeminal neuralgia? A systematic review and meta-analysis[J]. Clin Neurosci, 2023, 109: 11-20.
2. 李龙龙, 寿记新.三叉神经痛的临床治疗进展[J].中国临床新医学, 2020, 13(4): 420-424.
3. 杨帆, 刘树轩, 刘云阳, 等. 显微血管减压联合三叉神经感觉根部分切断治疗特殊类型三叉神经痛1例[J]. 中国神经精神疾病杂志, 2022, 48(5): 303-305.
4. XIA Y, YU G, MIN F, et al. The Focus and New Progress of Percutaneous Balloon Compression for the Treatment of Trigeminal Neuralgia [J]. Pain Res, 2022, 15: 3059-3068.
5. LECLERC A, SALKINE M F, EMERY E. Percutaneous balloon compression for trigeminal neuralgia: a how I do it[J]. Acta Neurochir (Wien), 2022, 164(11): 2939-2943.
6. BERGENHEIM AT, ASPLURUI P, LINDEROTH B. Percutaneous retrogasserian balloon compression for trigeminal neuralgia: review of critical technical details and outcomes[J]. World Neurosurg, 2013, 79(2): 359-368.
7. VALENZUELA CECCHI B, FIGUEROA F, CONTRERAS L, et al. Percutaneous Balloon Compression for the Treatment of Trigeminal Neuralgia: A Review of 10 Years of Clinical Experience [J]. Cureus, 2023, 15(8): e43645.
8. XIAO X, WEI Z, REN H, et al. Comparison of Effectiveness and Safety between Intraoperative 3D-CT-Guided and C-Arm-Guided Percutaneous Balloon Compression for Idiopathic Trigeminal Neuralgia: A Multi-Center Retrospective Study[J].Pain Res Manag, 2021, 2021: 9306532.
9. D'ERCOLE M, IZZO A, SILVESTRI M, et al. Percutaneous Balloon Compression for Treatment of Trigeminal Neuralgia Assisted by O-Arm O2-Based Navigation: Case Series and Review of the Literature[J]. Oper Neurosurg (Hagerstown),2022,23(6):464-471.
10. TAN K, LI J, PENG Y, et al. Robot-Assisted Percutaneous Balloon Compression in Elderly Patients with Trigeminal Neuralgia[J]. Pain Res, 2023, 16: 1161-1168.
11. FILIPPIADIS D K, MARKOUTSAS D, MAZIOTI A, et al. Computed Tomography-Guided Radiofrequency Thermocoagulation of the Gasserian Ganglion Using an Alternative to Hartel Anterior Approach: A Bicentral Study[J]. Pain Physician, 2020, 23(3): 293-298.
12. AGAZZI S, CHANG S, DRUCKER M D, et al. Sudden blindness as a complicalion of percutaneous trigeminal procedures : mechanism analysis and prevention[J]. J Neurosurg, 2009,110(4):638-641.
13. LAMBRU G, ZAKRZEWSKA J, MATHARU M. Trigeminal neuralgia: a practical guide[J]. Pract Neurol, 2021, 21(5): 392-402.
14. LI M W, JIANG X F, NIU C S. Efficacy of and risk factors for percutaneous balloon compression for trigeminal neuralgia in elderly patients[J]. Br J Neurosurg, 2021, 35(3): 280-284.
15. URCULO E, ALFARO K, ARRAZOLA M, et al. Trochlear nerve palsy after repeated percutaneous balloon compression for recurrent trigeminal neuralgia: case report and pathogenic considerations[J]. Neurosurgery, 2004, 5 (2): 505-508; discussion 508-509.
16. IRHIDA M C, DE ALMEIDA A N, DA NOHREGA J C, et al. Sensory abnormalities and masticatory function after microvascular decompression or balloon compression for trigeminal neuralgia compared with carbamazepine and healthy controls[J]. J Neurosurg, 2015, 122(6): 1315-1323.
17. WANG C H,DOU Z, YAN M, et al.The comparison of efficacy and complications of coblation and radiofrequency thermocoagulation for V2/V3 idiopathic trigeminal neuralgia: a retrospective cohort study of 292 cases[J]. BMC Anesth, 2021, 21(1): 6.
18. 王文贝, 娄飞云, 翟红洁, 等. DSA与传统C臂机引导微球囊压迫术治疗三叉神经痛的疗效比较[J]. 蚌埠医学院学报, 2022, 47(5): 635-637, 641.
19. GRACIOLLI CORDEIRO J, ASSUMPCAO DE MONACO B, THEODOTOU CB, et al. Robotic-assisted stereotactic percutaneous balloon compression for trigeminal neuralgia treatment[J]. Clin Neurol Neurosurg, 2022, 221: 107412.
20. 马峻, 李勇刚, 陈心, 等. 机器人辅助经皮球囊压迫术治疗三叉神经痛的临床分析[J]. 中华神经外科杂志, 2021, 37(9):894-898.
21. 谭可, 李锦平, 彭玉涛, 等. 机器人辅助经皮球囊压迫术治疗老年人三叉神经痛[J]. 中华老年医学杂志, 2023, 42(7): 831-835.
22. LIU Q Q, WANG J J, WANG C Q, et al. Robot-assisted percutaneous balloon compression for trigeminal neuralgia: technique description and short-term clinical results [J]. FrontSurg, 2022, 9(3): 869223.
23. LI N, SUN T, HU B, et al. Robot-assisted percutaneous balloon compression for trigeminal neuralgia- preliminary experiences [J]. BMC Neurol, 2023, 23(1): 163.
24. DONG F Y, ZHAN Q, SHAO Z K, et al. Clinical study on the treatment of primary trigeminal neuralgia by robot-assisted percutaneous balloon compression[J]. Front Surg, 2022, 9: 1007818.
【引用格式】苏复海,陈云鹏,梁有明,等. 机器人辅助与DSA引导经皮穿刺三叉神经球囊压迫术临床对比分析[J]. 中国神经精神疾病杂志,2024,50(8):470-475.
【Cite this article】SU F H,CHEN Y P,LIANG Y,et al.Clinical comparative analysis of robot-assisted and DSA-guided percutaneous balloon compression for the treatment of trigeminal neuralgia[J]. Chin J Nervous Mental Dis,2024,50(8):470-475.
DOI:10.3969/j.issn.1002-0152.2024.08.003
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言













#三叉神经痛# #机器人# #数字减影血管造影# #经皮穿刺球囊压迫术#
0